
The flexibility to remotely management robots in real-time, also referred to as teleoperation, could possibly be helpful for a broad vary of real-world functions. In recent times, some engineers have been attempting to develop teleoperation methods that enable customers to information the actions of humanoid robots, which have a physique construction resembling that of people, getting the robots to exactly imitate their whole-body actions.
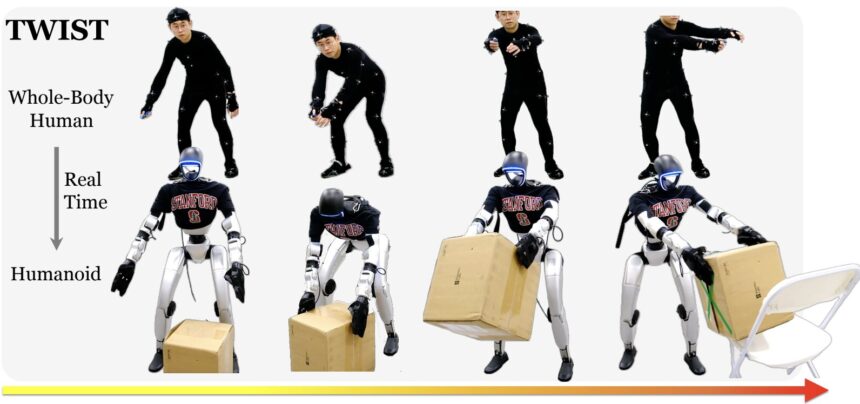
Researchers at Stanford College and Simon Fraser College lately launched TWIST (teleoperated whole-body imitation system), a brand new system that permits humanoid robots to carefully imitate the whole-body motions of human customers in real-time, efficiently finishing varied real-world duties.
This technique, outlined in a paper posted to the preprint server arXiv, leverages movement seize (MoCap) knowledge, together with reinforcement studying and imitation studying approaches.
“We wish humanoids to have the identical degree of whole-body dexterity as people. Think about a messy kitchen,” Yanjie Ze, first writer of the paper, advised Tech Xplore. “People can maintain issues with two palms and use their ft to maneuver obstacles, similar to a basket on the bottom; people can even open the door utilizing the edges of their our bodies or their elbows. We wish to make humanoids obtain the identical by imitating people instantly.”
TWIST, the system developed by Ze, Karen Liu and their colleagues, makes use of knowledge captured by MoCap units, applied sciences that exactly monitor the physique actions of people. In comparison with many teleoperation methods launched previously, TWIST leverages joints throughout your entire our bodies of humanoid robots to carefully replicate human actions, whereas additionally making certain that the motions of various limbs are coordinated.
“TWIST is a system that teleoperates humanoid robots utilizing the whole-body motion of an individual in actual time,” defined Ze. “We precisely seize human movement after which use AI to map it to instructions that humanoids could execute. Our system has a lot increased accuracy in whole-body management than prior work and allows various motions and abilities that can not be completed earlier than.”
Ze and his colleagues evaluated their teleoperation system in a collection of real-world experiments, utilizing the humanoid robotic G1, developed by Unitree Robotics. They discovered that their system efficiently enabled the teleoperation of this robotic and may be utilized to different humanoid robots, such because the T1 robotic created by Booster Robotics.
“Essentially the most notable discovering is that whole-body human movement knowledge is highly effective sufficient to manage humanoids (together with their legs, ft, waists, knees, elbows, and so forth.,),” mentioned Ze. “Our system permits all these physique components to maneuver as these of people do, which allows robots to exhibit human-like, whole-body dexterity. The quick software is to make use of people to manage humanoids to gather large-scale knowledge to coach robotic basis fashions.”
, legged manipulation (e.g., kicking the football), locomotion (e.g., walking sideways), and expressive motions (e.g., Waltz dance). Credit: Yanjie Ze")
Sooner or later, the TWIST system could possibly be improved additional, for example, by lowering its reliability on MoCap methods, which aren’t transportable and thus limit its functions. Finally, it could possibly be deployed in real-world settings, for example to permit robots to finish guide duties in hazardous working environments or automate industrial processes that require excessive ranges of precision.
“We wish humanoid robots to be really clever and succesful in carrying out real-world duties,” added Ze. “Our subsequent step might be to scale up knowledge assortment after which to allow robots to study autonomous abilities.”
Extra data:
Yanjie Ze et al, TWIST: Teleoperated Entire-Physique Imitation System, arXiv (2025). DOI: 10.48550/arxiv.2505.02833
© 2025 Science X Community
Quotation:
Entire-body teleoperation system permits robots to carry out coordinated duties with human-like dexterity (2025, Might 15)
retrieved 15 Might 2025
from https://techxplore.com/information/2025-05-body-teleoperation-robots-tasks-human.html
This doc is topic to copyright. Aside from any honest dealing for the aim of personal examine or analysis, no
half could also be reproduced with out the written permission. The content material is supplied for data functions solely.


