
The Italian Institute of Know-how (IIT) has reached a milestone in humanoid robotics by demonstrating the primary flight of iRonCub3, the world’s first jet-powered flying humanoid robotic particularly designed to function in real-world environments.
The analysis workforce studied the complicated aerodynamics of the unreal physique and developed a sophisticated management mannequin for programs composed of a number of interconnected elements. The general work on iRonCub3, together with actual flight exams, took about two years. Within the newest experiments, the robotic was capable of elevate off the ground by roughly 50 cm whereas sustaining its stability. The achievement paves the way in which for a brand new era of flying robots able to working in complicated environments whereas sustaining a human-like construction.
The aerodynamics and management research have been described in a paper published in Communications Engineering.
The analysis was carried out by roboticists of IIT in Genoa, Italy, in collaboration with the group of Alex Zanotti at DAER Aerodynamics Laboratory of Polytechnic of Milan—the place a complete collection of wind tunnel exams have been carried out—and the group of Gianluca Iaccarino at Stanford College—the place deep studying algorithms have been used to establish aerodynamic fashions.
The robotic flight demonstration represents the newest milestone of the Synthetic and Mechanical Intelligence (AMI) Lab at IIT in Genoa, led by Daniele Pucci. Their analysis goals to push the boundaries of multi-modal humanoid robotics, combining terrestrial locomotion and aerial mobility to develop robots able to working in unstructured and excessive environments.
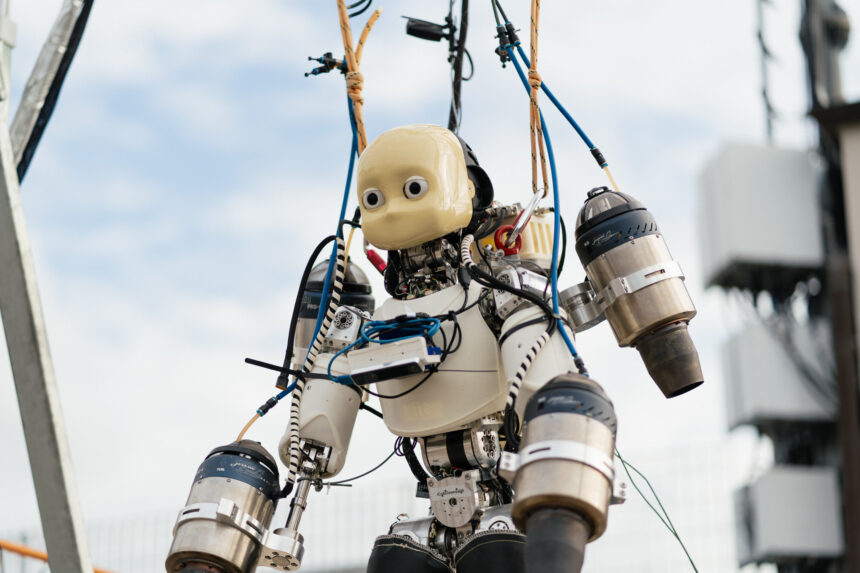
iRonCub3 is the technological evolution of earlier prototypes and is predicated on the newest era of the iCub humanoid robotic (iCub3), developed to be teleoperated. It integrates 4 jet engines, two mounted on the arms and two on a jetpack hooked up to the robotic’s again.
Modifications to the iCub {hardware} design have been required to help the exterior engines, corresponding to creating a brand new titanium backbone and including heat-resistant covers for cover. The robotic mixed with the jet engines weighs about 70 kg, whereas the generators can present a most thrust power of greater than 1000 N. This configuration permits the robotic to hover and carry out managed flight maneuvers even within the presence of wind disturbances or environmental uncertainties. The exhaust temperature can attain 800 levels.
“This analysis is radically totally different from conventional humanoid robotics and compelled us to make a considerable leap ahead with respect to the cutting-edge,” explains Daniele Pucci. “Right here, thermodynamics performs a pivotal position—the emission gases from the generators attain 700°C temperature and stream at practically the velocity of sound. Aerodynamics have to be evaluated in real-time, whereas management programs should deal with each gradual joint actuators and quick jet generators. Testing these robots is as fascinating as it’s harmful, and there’s no room for improvisation.”
The AMI analysis workforce targeted on the platform’s dynamic stability, which is made specifically complicated by the robotic’s humanoid morphology. In contrast to typical drones, which have symmetric and compact buildings, iRonCub3 has an elongated form, with lots distributed throughout movable limbs and a variable middle of mass. This required the event of superior flight stability fashions that contemplate the robotic’s multibody dynamics and the interplay between jet propulsion and limb actions.
Furthermore, the movable limbs considerably complicate the aerodynamics, which change with each movement of any of the robotic’s limbs.
 Lab at IIT in Genoa, led by Daniele Pucci. Their research aims to push the boundaries of multi-modal humanoid robotics, combining terrestrial locomotion and aerial mobility to develop robots capable of operating in unstructured and extreme environments. Credit: IIT-Istituto Italiano di Tecnologia")
The researchers have carried out intensive wind tunnel experiments, superior Computational Fluid Dynamics (CFD) simulations and developed AI-based fashions able to estimating aerodynamic forces in actual time.
“Our fashions embody neural networks skilled on simulated and experimental knowledge and are built-in into the robotic’s management structure to ensure steady flight,” explains Antonello Paolino, first creator of the paper and Ph.D. scholar in a joint program between the IIT and Naples College, who spent a semester as a visiting researcher at Stanford College.
Because of this, iRonCub3 is supplied with AI-powered management programs that permit it to fly whereas dealing with high-speed turbulent airflows, excessive temperatures, and the complicated dynamics of multi-body programs.
The superior aerodynamic modeling developed by IIT demonstrates that it’s doable to keep up posture and stability even throughout non-stationary maneuvers, corresponding to sequential engine ignition or adjustments in physique geometry.
These research may be transferred to different robots with unconventional morphologies, representing a singular case in comparison with classical drones, whose stability depends on symmetry and simplified management methods that always neglect the robotic’s personal aerodynamics and thermodynamics.
The ultimate design of iRonCub3 is the results of a sophisticated co-design course of, particularly developed to combine synthetic intelligence and multi-physics into the design of flying robots. These methods, that are modern within the discipline of robotics, permit for the simultaneous optimization of each physique form and management methods, contemplating the complicated interactions between aerodynamics, thermodynamics, and multibody dynamics.
Co-design was used to find out the optimum placement of the jet generators to maximise management and stability throughout flight. Superior design methods have been additionally employed to handle the warmth dissipation generated by the engines, thus guaranteeing the structural integrity of the robotic even underneath excessive working circumstances.
The robotic has been utterly re-engineered to face up to the cruel circumstances related to aerial locomotion, introducing main enhancements targeted on precision actuation, enhanced thrust management through built-in sensors, and superior planners for coordinated takeoff and touchdown.
All through the design course of, quite a few iterative changes have been made primarily based on the outcomes of superior simulations and experimental testing, resulting in the robotic’s present configuration. This strategy has allowed the workforce to beat the restrictions of conventional methodologies and represents a step ahead within the computerized and built-in design of complicated robotic programs.
The primary flight exams of iRonCub3 have been carried out in IIT’s small flight-testing space, the place the robotic was capable of elevate off the ground by roughly 50 cm. Within the coming months, prototype testing will proceed and might be additional enhanced due to a collaboration with Genoa Airport (Aeroporto di Genova), which can present a devoted space that might be arrange and geared up by the Italian Institute of Know-how in compliance with all required security laws. The world will host future experimental campaigns.
Functions of flying humanoid robots like iRonCub3 are envisioned in a wide range of future situations, corresponding to search-and-rescue operations in disaster-struck areas, inspection of hazardous or inaccessible environments, and exploration missions the place each manipulation capabilities and aerial mobility are important.
Extra data:
Antonello Paolino et al, Studying aerodynamics for the management of flying humanoid robots, Communications Engineering (2025). DOI: 10.1038/s44172-025-00447-w
Quotation:
Humanoid robotic achieves managed flight utilizing jet engines and AI-powered programs (2025, June 18)
retrieved 19 June 2025
from https://techxplore.com/information/2025-06-humanoid-robot-flight-jet-ai.html
This doc is topic to copyright. Other than any truthful dealing for the aim of personal research or analysis, no
half could also be reproduced with out the written permission. The content material is offered for data functions solely.


