
Odd issues can occur when a wave meets a boundary. Within the ocean, tsunami waves which might be hardly noticeable in deep water can develop into fairly massive on the continental shelf and shore, because the waves sluggish and their mass strikes upward.
The Casimir impact is the attraction of two uncharged, parallel plates as a result of digital quantum mechanical waves with wavelengths higher than the plate separation are excluded between them, so digital fields exterior the plates push them inward. Parallel plates partially submersed in water attract one another as longer wavelength momentum-carrying water waves are excluded from the central area. (Hypothesis a few maritime Casimir impact between docked ships is still under debate.)
Now scientists have proven {that a} floating, symmetric oscillating robotic will expertise forces when it comes near a boundary. These forces can be utilized for self-propulsion with out the necessity for extra typical mechanisms comparable to a propeller.
The research is published within the journal Bodily Evaluation Letters.
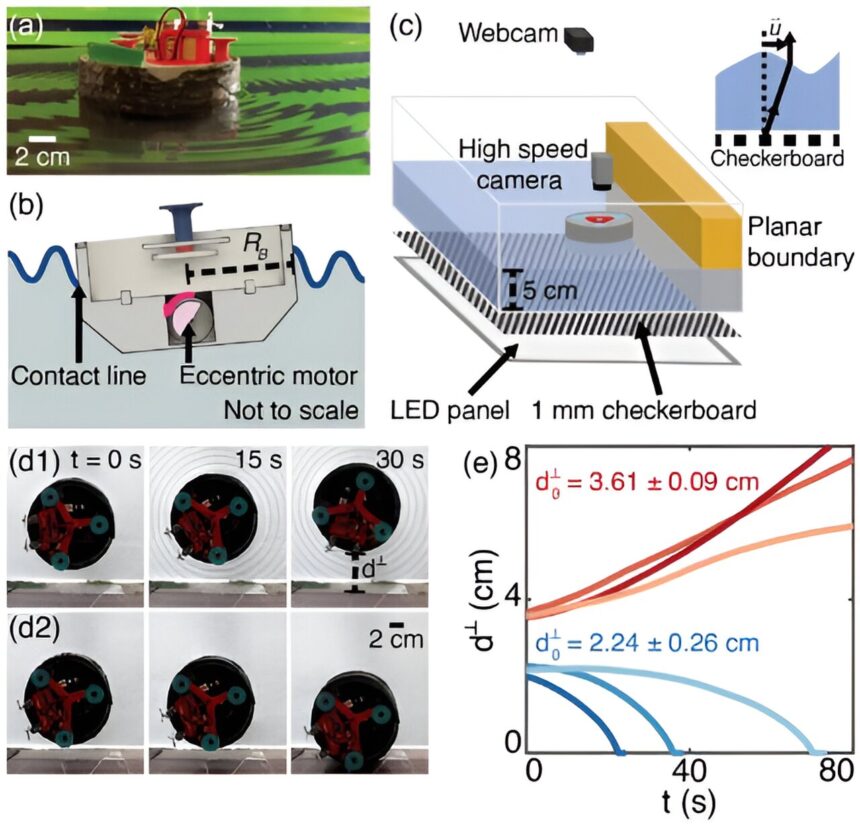
Led by Ph.D. pupil Steven W. Tarr on the Georgia Institute of Know-how, the crew constructed a 3D-printed round float 12 cm in diameter with a mass of 368 g. Onboard, they hooked up battery-operated motors that vibrate the boat with a controllable frequency, producing a vibrating movement alongside the fore-aft (roll) axis. When powered on, the craft produced a sequence of symmetrical waves on the water floor, all the identical wavelength, radiating away from it.
An acrylic sheet was positioned close by within the water to behave as a boundary, sufficiently lengthy to successfully create a one-dimensional system, so solely the boat’s motion perpendicular to the wall wanted to be monitored. Removed from the wall (relative to the dimensions of the boat and the wavelengths of the water waves), there was no web power on the boat. However near the wall, the wave-generating boat was noticed to expertise both a horny or repulsive habits, relying on its preliminary distance from the wall and the frequency of water waves being generated.
Researchers used a webcam to document the boat’s motion and measured its lateral motion (perpendicular to the wall), whereas additionally measuring its acceleration on this perpendicular course (which was lower than 100 micrometers per second-squared). Waves emanating from the oscillating boat have been seen and measured with a high-speed digital camera through Schlieren images, which measures adjustments to a fluid’s circulation charge by observing adjustments in its refractive index.
When it began near the wall—about half its radius or much less—the boat was more and more interested in the wall as its preliminary distance decreased and its frequency of oscillation elevated (and therefore so did the frequency of the water waves). In a mid-range, at an preliminary distance of about two-thirds of a radius and at decrease frequencies, the power on the boat turned barely repulsive, shifting it away from the wall. At massive distances (relative to the radius), there was no web power on the boat.
As a result of the acceleration was fairly small, lower than 10-millionths of Earth’s floor gravitational acceleration (“g”), steps have been taken to isolate the forces from short-term results from viscosity, drag on the boat as a result of waves themselves, and the boat’s inertia. Nonetheless, the forces have been small, under 100 micronewtons.
The online-force, self-propagation locomotive phenomenon of the waves emanating from the boat occurred as mirrored waves from the wall struck the boat’s hull with adequate power. On the wall-side of the boat, mirrored waves struck the hull with a smaller wave peak (amplitude) than they left it, on account of dispersion of the waves as they traveled throughout the water’s floor. These smaller returning waves have been subtracted from the bigger emitted waves, interfering and successfully reducing the amplitude of the waves the boat emitted on the wall facet.
In impact, the boat emitted asymmetrical waves, bigger within the course reverse the wall, and smaller in the direction of the wall. This asymmetry between the 2 sides of the boat resulted in a horny power in the direction of the wall.
Farther from the wall, the mirrored waves had too small a peak to have an effect on web wave technology, however nonetheless carried some momentum, leading to a slight repulsive power. Removed from the wall, the mirrored waves had dissipated so that they offered no significant power.
Frequency dependence arose as a result of whereas the power of the mirrored wave elevated with frequency, the contact of the emitted waves with the wall led to sophisticated dynamics on the contact line, dissipating substantial power and modifying the amplitude of the mirrored waves.
“Our research is a terrific instance of the wealth of phenomena ready to be found on the interface of physics and robotics,” stated Daniel Goldman, a co-author and physics professor on the Georgia Institute of Know-how, who calls this subject “robophysics.”
“Making and utilizing analogies from different branches of physics (on this case, the Casimir impact in quantum subject concept) will be helpful in creating new approaches to robotic motion analogous to our previous work on ‘mechanical diffraction’ in undulatory limbless techniques,” Goldman concluded.
Extra data:
Steven W. Tarr et al, Probing Hydrodynamic Fluctuation-Induced Forces with an Oscillating Robotic, Bodily Evaluation Letters (2024). DOI: 10.1103/PhysRevLett.132.084001
© 2024 Science X Community
Quotation:
An oscillating robotic can propel itself through the reflection of water waves (2024, March 9)
retrieved 10 March 2024
from https://techxplore.com/information/2024-03-oscillating-robot-propel.html
This doc is topic to copyright. Other than any truthful dealing for the aim of personal research or analysis, no
half could also be reproduced with out the written permission. The content material is offered for data functions solely.


